生産ラインにおける
モーション確認と成立性検証
自動化ラインシミュレーションシステム
Virfit
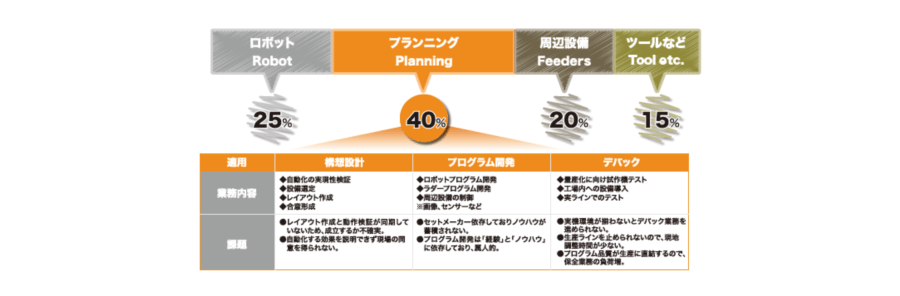
お客様の課題

- 実機がない環境で、モーション確認と成立性検証がしたい
- 生産ラインの現地立ち上げ期間を短くしたい
- 設備同士の干渉を確認し、実機破損を防止したい
- 周辺設備を考慮した稼動領域の検証をしたい
その課題、Virfitが解決します
Virfitとは
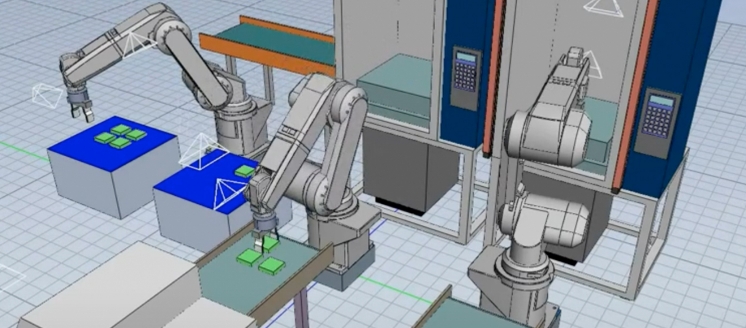
3Dモデルによる成立性検証と
レイアウト最適化を実現。
仮想空間上でのプログラム確認で“実機レス”のデバッグを再現し、構想設計から現地立ち上げまでの期間短縮を支援いたします。
導入効果
-
効果 01 実機が揃わなくてもモーション確認と成立性検証が可能に
- 3D CADデータ取り込み(複数フォーマットに対応)
- ハンド・周辺設備を考慮した稼動領域の検証
- 対象ワーク上に教示点の生成が可能
- マウス中心の操作でモーション生成が可能
-
効果 02 現地立上までの期間を大幅短縮

- PLCと接続し、ラダープログラムのデバッグが可能
- 仮想空間上で設備の干渉が確認でき実機破損の防止
- 故障発生時の復旧手順などの異常系のテストが可能
- モデルの資産化により流用設計が可能
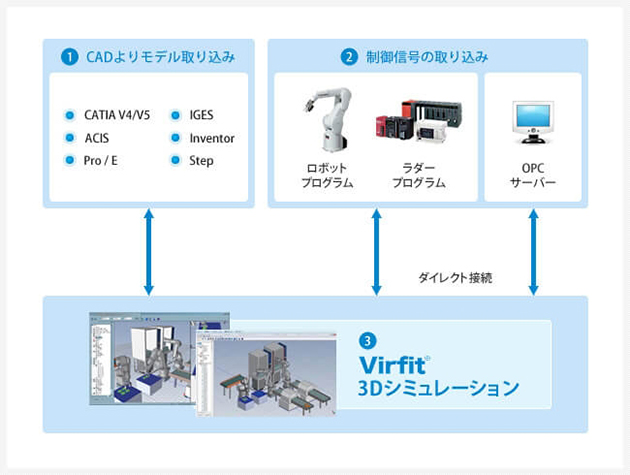
Virfit 3Dシミュレーションの構成
特長
-
Point 1
ロボットプログラムの自動生成
-
Point 2
ハンド・周辺設備を考慮した
稼動領域の検証 -
Point 3
対象ワーク上に教示点の生成が可能
マウス中心の操作で
モーション生成が可能 -
Point 4
故障発生時の復旧手順などの
異常系のテストが可能 -
Point 5
PLCと接続し、
ラダープログラムのデバッグが可能
仮想空間上で設備の干渉が確認でき
実機破損を防止 -
Point 6
生産ラインの成立性を構想段階から
3Dモデルによる検証が可能
(ロジックチャート機能)
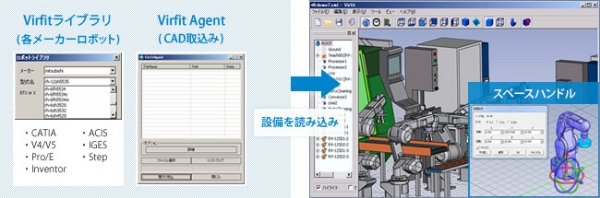
Point 1 ロボットプログラムの自動生成
- VirfitのライブラリーやVirfit Agent(CAD取り込み)から、設備を読み込みます。
- スペースハンドルで位置・角度を調整します。
Point 2
ハンド・周辺設備を考慮した
稼動領域の検証
- 4軸・6軸の独自キネマを搭載
- ツール先端などの操作で簡単に姿勢定義できます。
- 動的干渉・隙間チェックができます。
Point 3
対象ワーク上に教示点の生成が可能
マウス中心の操作で
モーション生成が可能
- ポイント指定、動作順序設定もマウス操作で可能です。
- 動的干渉・隙間チェックができます。
Point 4
故障発生時の復旧手順などの
異常系のテストが可能
- 複数メーカーのPLCとの接続が可能
- ロボット・シリンダー・リンクなどさまざまな設備に対応
Point 5
PLCと接続し、ラダープログラムのデバッグが可能
仮想空間上で設備の干渉が
確認でき実機破損を防止
- 操作パネル機能により、任意のタイミングで故障発生可能
- 復旧手順の確認、および原点復帰時の干渉確認
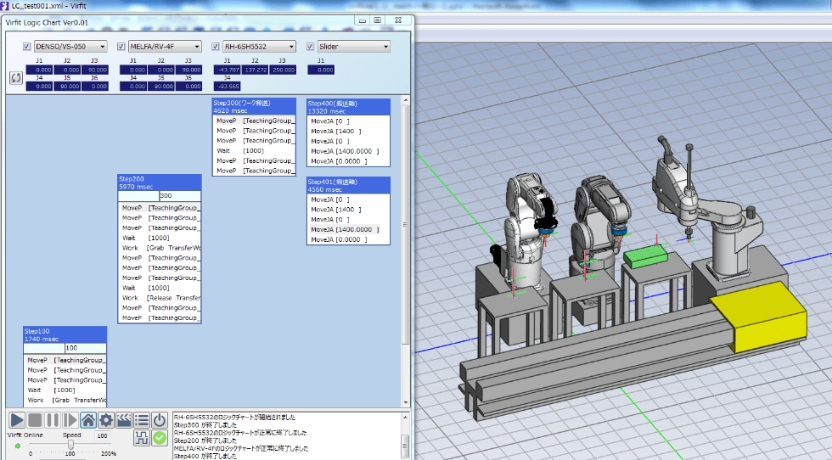
Point 6 生産ラインの成立性を構想段階から3Dモデルによる検証が可能(ロジックチャート機能)
- 各設備の工程ごとにステップを組み、他設備とのタイミングを図りながらシミュレーションを実行可能。
- ステップ内にはアクション(命令)を記述することができ、各設備に速度、加速度情報を持たせることによってタクトタイム計算が可能。
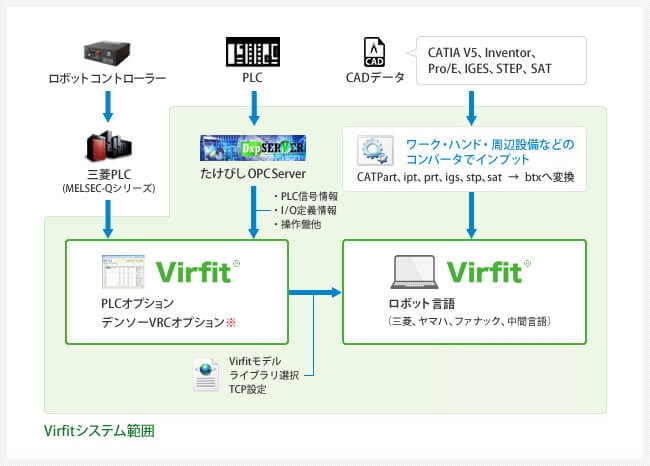
システム構成
導入事例・ユースケース
Virfit ユースケース
お客様の課題

- 生産ラインを停めることで生産数に影響が出るため、現場からは現地調整時間の短縮を要望されていた。但し、実機環境がないとプログラムのデバッグができないため、事前に検証する方法を探していた。
導入ポイント・導入効果

- Virfit-PLCを活用することにより、搬送タイミングのずれなど、実機環境がないと確認できなかった設計ミスが顕在化し、現地調整前にプログラムの修正ができた。 それにより、現地調整時間の短縮につながった。
お問い合わせ
![]()